Yuichi Kurita, Human Systems Augmentation (HuSA) Lab.
【卒業・修了した学生の卒論・修論内容はこちらをご覧ください】
スマートコーチング技術
工学や情報処理の技術を異分野に応用し,新たな発見や専門家をサポートする機器の開発を目指しています.特に医療,介護、ヘルスケア分野への応用に力を入れており,医療関係者との共同研究を行っています.
体操支援モバイルアプリー広島大学・栗田雄一/株式会社ヒューマンモデルー
日常生活動作(ADL)記録・推定システム ー広島大学・栗田雄一/株式会社ヒューマンモデル−
主体性のあるスキルアップを促進するAIスマートコーチング技術の開発
我が国における平均寿命は約85歳と言われており,2030年には人口の40%が高齢者になると推定されています.一人で自立して生活ができる指標である健康寿命との差は約10年あり,多くの高齢者がその10年間は何らかの介助が必要になります.このような身体機能の低下に対して,医療機関でのリハビリ治療終了後は,自己で運動習慣や効率性の高いトレーニングを継続する必要がありますが,在宅で主体性を持ってトレーニングすることは楽ではありません.そこでAI技術を活用した「健康長寿を楽しむスマートソサエティ」の実現に向けて,非接触運動センシング,身体機能のAI判別、難易度やパラメータの自動調整の機能をもつ,「主体性のあるスキルアップを促進するAIスマートコーチング技術」を開発しています.
- Shino Matsuura, Kazuhiko Hirata, Hiroaki Kimura, Yoshitaka Iwamoto, Makoto Takahashi, Yui Endo, Mitsunori Tada, Tsubasa Maruyama, Yuichi Kurita, Motion measurement and analysis for Functional Independence Measure, International Journal of Automation Technology, 2023
- Priyanka Ramasamy, Gunarajulu Renganathan, Yuichi Kurita, Muscle Activity and Ground Reaction Force-Based Control Strategies for Actuating Soft Wearables Using Squat Motion, IEEE Humanoids 2022, WeD1.4, Okinawa, Japan, November 28-30, 2022.
- Mayuko Minakata, Tsubasa Maruyama, Mitsunori Tada, Priyanka Ramasamy, Swagata Das, and Yuichi Kurita, Safe Walking Route Recommender Based on Fall Risk Calculation Using a Digital Human Model on a 3D Map, IEEE Access, Vol.10, pp.8424-8433, January 2022
- Swagata Das, Wataru Sakoda, Priyanka Ramasamy, Ramin Tadayon, Antonio Vega Ramirez, and Yuichi Kurita, Feature Selection and Validation of a Machine Learning-Based Lower Limb Risk Assessment Tool: A Feasibility Study, Sensors, 21(19):6459, September 2021
- Haruki Toda, Tsubasa Maruyama, Yuichi Kurita, and Mitsunori Tada, Individual Adjustment of Contraction Parameters for Effective Swing Assist Using a Pneumatic Artificial Muscle in the Elderly, Applied Sciences, Vol.11, No.9, 4308, May 2021.
人間の感覚/運動機能の拡張
歳をとっても日々の生活を楽しむためには,自分の身体を自分で思い通り動かしている感覚や,自分自身でさまざまなものを感じている感覚を保持しつづけることが重要です.道具や情報技術は,人の身体能力の壁や限界を乗り越え,未知の体験をもたらしてくれる可能性を秘めています.これを実現すべく,人の運動や感覚の機能・能力を拡張・向上する人間拡張アシストデバイスの開発を行っています.人工筋を利用した作業支援,身体能力の拡張,ウェアラブル力覚フィードバックへの展開

- Swagata Das and Yuichi Kurita, ForceArm: A wearable pneumatic gel muscle (PGM) based assistive suit for the upper limb, IEEE Transactions on Medical Robotics and Bionics, Vol.2, Issue 2, pp. 269-281, May 2020.
- Masataka Yamamoto, Yusuke Kishishita, Koji Shimatani, and Yuichi Kurita, Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles, Applied Sciences, Vol.9, No.15, Article #3108, August 2019.
- Kazunori Ogawa, Akito Kadowaki, Koji Shimatani, Masaya Hasegawa, Keita Takahashi, Toshio Tsuji, and Yuichi Kurita, Supporting effects on muscles of a motion assistive wear depending on the fixture position, Journal of Robotics and Mechatronics, Vol. 30, No. 5, pp. 729-739, October 2018
- Chetan Thakur, Kazunori Ogawa, Toshio Tsuji, and Yuichi Kurita, Soft Wearable Augmented Walking Suit with Pneumatic Gel Muscles and Stance Phase Detection System to Assist Gait, IEEE Robotics and Automation Letters, Vol.3, Issue 4, pp.4257-4264, October 2018
- Swagata Das, Cassie Lowell, Yusuke Kishishita, Kazunori Ogawa, Toshio Tsuji, and Yuichi Kurita, ForceHand glove: a wearable force-feedback glove with pneumatic artificial muscles (PAMs), IEEE Robotics and Automation Letters, Vol. 3, Issue 3, pp.2416-2423, July 2018
無電力供給型身体運動支援スーツ/アンプラグド・パワード・スーツ Unplugged Powered Suit
(日本語記事@ASCII.jp) (英語記事@EurekAlert!) (英語記事@Medical Daily) (英語記事@EXOSKELETON REPORT))- Kazunori Ogawa, Chetan Thakur, Tomohiro Ikeda, Toshio Tsuji, and Yuichi Kurita, Development of a Pneumatic Artificial Muscle Driven by Low Pressure and Its Application to the Unplugged Powered Suit, Advanced Robotics, Vol.31, Issue 21, pp.1135-1143, November 2017
- 栗田雄一,小川和徳, 低圧駆動型空気圧人工筋を利用したアンプラグド・パワード・スーツの開発, 第一回超人スポーツ学術研究会,pp.7-8, 2015.12.10
- 小川和徳,池田智浩,栗田雄一, 低圧駆動型空気圧人工筋の開発とそれを利用した無外部動力歩行支援装置, 第33回日本ロボット学会学術講演会,RSJ2015AC2C1-06, 2015.9.4
人工筋スーツを活用したスポーツの拡張

- Wataru Sakoda, Toshio Tsuji, and Yuichi Kurita, VR training system of step timing for baseball batter using force stimulus, AsiaHaptics2018, Songdo, Korea, November 14-16, 2018
- Kazunori Ogawa, Tomohiro Ikeda, and Yuichi Kurita, Unplugged Powered Suit for Superhuman Tennis, 12th France - Japan Congress, 10th Europe - Asia Congress on Mecatronics, pp.355-358, Mie, Japan, September 10-12, 2018
- Yusuke Kishishita, Antonio Vega Ramirez, Swagata Das, Chetan Thakur, Yohei Yanase, and Yuichi Kurita, Muscleblazer : A wearable laser tag module powered by PAM-induced force-feedback, First International Symposium on Amplifying Capabilities, Competing in Mixed Realities (Superhuman Sports Design Challenge), Delft, Netherlands, July 2-5, 2018
- Wataru Sakoda, Antonio Vega, Kazunori Ogawa, Toshio Tsuji and Yuichi Kurita, Reinforced suit using low pressure driven artificial muscles for baseball bat swing, Augmented Human 2018, Article No.30, Seoul, Korea, Februrary 7-9, 2018
- 小川和徳,池田智浩,栗田雄一, 低圧駆動型人工筋を用いたテニス用アンプラグド・パワード・スーツの開発, 超人スポーツ学術研究会, 2016.12.18
人の感覚・運動機能を向上させるスーツ:SEnS
(日本語記事@ギズモードジャパン) (英語記事@EurekAlert!) (英語記事@engadget)- 栗田雄一,佐藤純平,田中孝之,篠原稔,辻敏夫, 感覚運動機能を向上させるウェアラブルスーツ:SEnS, 第32回日本ロボット学会学術講演会,RSJ2014AC2Q2-04,2014.9.5
- Yuichi Kurita, Jumpei Sato, Takayuki Tanaka, Minoru Shinohara, and Tosho Tsuji, Unloading muscle activation enhances force perception, Augmented Human 2014, March 7-9, 2014. DOI:10.1145/2582051.2582055
確率共鳴現象に基づく指先知覚感度を増強させるウェアラブルデバイス
(日本語での研究紹介) (英語での研究紹介@Georgia Tech.)- 栗田雄一,末田大和,上田淳,辻敏夫, 確率共鳴現象を利用した触覚知覚感度の向上効果に関する考察, 電子情報通信学会技術報告, Vol.113, No.272, WIT2013-45, pp.13-16, 2013.10.26-27
- Yuichi Kurita, Minoru Shinohara, and Jun Ueda, Wearable Sensorimotor Enhancer for Fingertip using Stochastic Resonance Effect, IEEE Transactions on Human-Machine Systems, Vol. 43, Issue 3, pp. 333-337, May 2013
身体モデリングと主観的感覚を考慮したデザイン
コンピュータ技術の進化により,筋・骨格の生理学的・機構的・力学的性質をコンピュータで 再現することが可能になりつつあります. これら身体モデリングの技術を応用して,人の運動や感覚の特性を物理的根拠の明確な指標でとらえて評価し,それを人をより賢くサポートするための補助技術や,より使いやすい製品設計につなげるための手法について研究しています.人を賢くサポートする機械や製品のための人間身体モデリング
(日本語での説明) , (英語での説明)- 人体運動評価装置、方法、およびプログラム, 栗田雄一,辻敏夫,櫻田浩平, 特願2012-267838 Filed on 2012.12.7
- Jumpei Sato, Kazuhiro Takemura, Naoki Yamada, Atsuhide Kishi, Kazuo Nishikawa, Takahide Nouzawa, Toshio Tsuji, and Yuichi Kurita, Investigation of subjective force perception based on estimation of muscle activities during steering operation, 2013 IEEE/SICE International Symposium on System Integration (SII2013), pp. 76-81, Kobe, Japan, Dec.14 - 17, 2013.
- 櫻田浩平,佐藤純平,辻敏夫,栗田雄一, 筋骨格モデルと終点誤差を考慮した運動評価, 第45回日本人間工学会中国・四国支部大会講演論文集,pp. 154-155,2012
- 竹村和紘, 山田直樹, 岸篤秀, 農沢隆秀, 田中良幸, 栗田雄一, 辻敏夫, 人間の主観的な力知覚モデルの提案とステアリング操作系への応用, 日本機械学会論文集, Vol. 78, No. 795, spp. 64-73, 2012
筋負担度推定に基づくインタフェースデザイン法
- 工業製品デザインシステム、方法、およびプログラム, 栗田雄一,辻敏夫,近藤雅也, 特願2014-033795 Filed on 2014.2.2
- 栗田雄一,近藤雅也,辻敏夫, 筋負担度を考慮したインタフェースデザイン法の提案, 日本機械学会ロボティクス・メカトロニクス講演会2014講演論文集,3P1-H07(1)-(2),2014.5.28
人の感じる持ちやすさ・使いやすさの定量評価 (研究紹介: NAIST)
- Atsutoshi Ikeda, Yuichi Kurita, and Tsukasa Ogasawara, " Product Usability Estimation using Musculoskeletal Model," IEEE RAS / EMBS International Conference on Biomedical Robotics and Biomechatronics (IEEE/EMBS BIOROB 2010), pp.307--312, Tokyo, Japan, 2010.9
- 池田 篤俊,栗田 雄一,小笠原 司, "腱骨格モデルを用いたつまみやすさの生体力学的解析", 日本ロボット学会論文誌, Vol.28, No.2, pp.191-199, 2010.3
運動強度依存ノイズを考慮した人の運動生成戦略
(研究紹介: NAIST)- 寺岡 宏敏,池田 篤俊,栗田 雄一,上田 淳,小笠原 司 運動指令依存ノイズに着目した確率的Broadcast Feedback制御の到達運動への適用" 情報処理学会第73回全国大会,3Q-8, 2011.3
デジタルハプティクス(Digital Haptics):デジタル技術で触感デザインを支援する
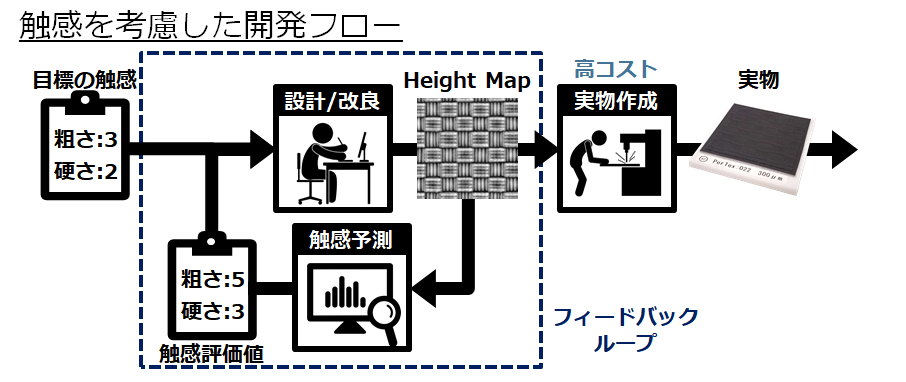
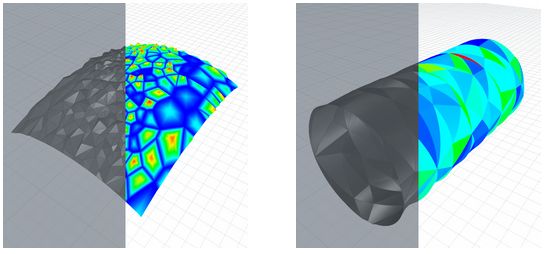
質感を構成する要素の一つである触感は,製品評価にも大きな影響を与えるため,触感の定量的な評価手法が必要です.しかし従来の触感評価技術は,実サンプルを用意してセンサで計測する必要があり,実サンプル製作コストがかかります.そこで我々は,コンピュータ上で触感をあらかじめ予測してテクスチャパターンを作ることを支援できる,Digital Haptics Design(触感デジタルデザイン)ツールを開発しています.ハイトマップデータから触感を予測する触感デジタルデザインツール
- 今岡恭司,山本義政,栗田 雄一, 離散ウェーブレット変換に基づく Subband Height Map を用いた触感推定, 第22回計測自動制御学会システムインテグレーション部門講演会, 1F1-02, オンライン,2021.12.15-17 ( 優秀講演賞 受賞 )
- 金本拓馬、今岡恭司、栗田雄一、表面テクスチャの空間周波数帯域の下限と粗さの主観評価の関係、日本機械学会ロボティクス・メカトロニクス部門講演会2021,1P1-M13、オンライン,2021.6.6-8

触感評価技術と触感デジタルデザイン
- Yoshihiko Kadoya, Mostafa Saidur Rahim Khan, Somtip Watanapongvanich, Masahiro Fukada, Yuichi Kurita, Masato Takahashi, Hideyasu Machida, Kiyotaka Yarimizu, Nanako Kimura, Hiroko Sakurai, Kenji Nakamura, and Ryouko Ebara, Consumers' Willingness to Pay for Tactile Impressions: A Study Using Smartphone Covers, IEEE Access, 10:85180-85188, August 2022
- Masahiro Fukada, Taiju Shizuno, and Yuichi Kurita, Evaluation of Human Roughness Perception by using Tactile MFCC, International Conference on SMART MULTIMEDIA, San Diego, CA, USA, December 16-18, 2019
- Taiju Shizuno, Tsuyoshi Arakawa, Toshio Tsuji, and Yuichi Kurita, Prediction of Affective Feeling of Tactile Texture Based on Measurement of Fingertip Deformation, IEEE International Conference on Systems, Man, and Cybernetics (SMC2018), Miyazaki, Japan, October 7-10, 2018
- 深田雅裕,静野大樹,栗田雄一, パチニ小体の周波数特性を考慮した触覚メル周波数ケプストラム係数の提案, 日本機械学会ロボティクス・メカトロニクス講演会2019講演論文集, 1P2-S07, 広島,2019.6.6-7
- 深田雅裕,辻敏夫,栗田雄一, 能動的指先なぞり速度は素材テクスチャの摩擦,表面粗さに応じて変わる, 第19回システムインテグレーション部門講演会(SI2018), 2A2-12, 大阪,2018.12.13-15

指先接触面変化率(偏心度)を用いた指先力推定
(日本語での研究紹介)- 氣比田晃士,辻敏夫,栗田雄一 接触面変化に基づく指先印加力推定とインタフェース応用, 日本バーチャルリアリティ学会大会2013講演論文集,pp.533-536,2013.9.18-20