Yuichi Kurita, Biological Systems Engineering Lab.
Human biomechanics model and product usability evaluation
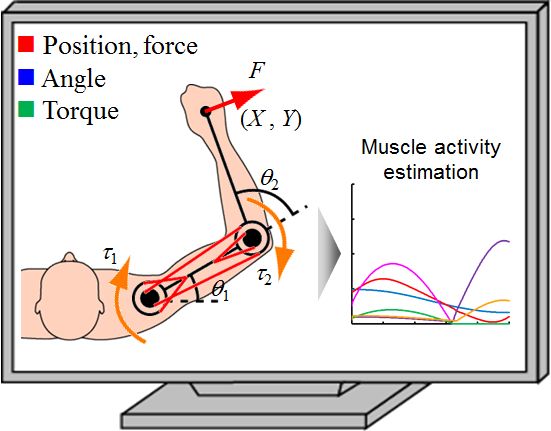
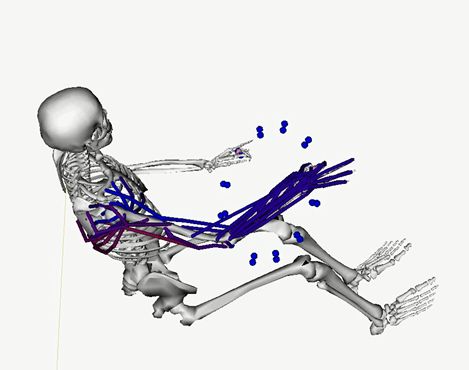
1. Background Recent advances in assistive technologies provide technical aids for promoting independent living and improving quality of life not only for disabled and elderly but also for healthy people who are working under harsh environments. To support the human motions in a safe and acceptable manner, the assistive device must clearly understand the human's intention and continuously adapt its behavior. Building functional models of human's motion and sensation are very helpful to evaluate the subjective efforts associated with intuitive, safe, and easy-to-use design.2. Research Summary We proposed muscle-force-based motion effort evaluation by estimating the muscle activity by means of a musculoskeletal model. The joint torque and the muscle activity to realize the torque that produced the motion was estimated by an inverse dynamics calculation and an optimization calculation of the muscle activity based on the physical and anatomical characteristics of muscles.
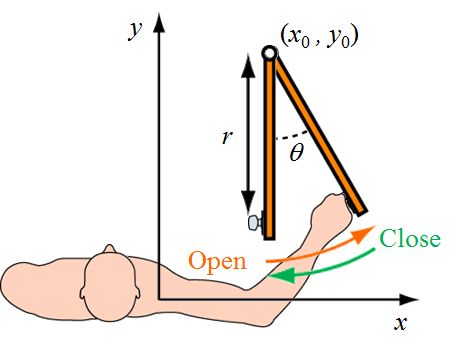
3. Result The simulation results showed that the scores of the motion effort based on the joint torque and based on the muscle force have different features. We explore the feasibility of the proposed method to the door opening/closing motion and the steering operation.
4. For Application Considering the human's physical and anatomical characteristics, the muscle-force-based motion effort evaluation have the potential to evaluate human's subjective effort. The proposed muscle-force-based motion effort evaluation method could be applied to the novel quantitative evaluation of the product usability.
Publications
- Yuichi Kurita, Atsutoshi Ikeda, Tadashi Matsumoto, and Tsukasa Ogasawara, "Evaluation of Grasp Efficiency based on Muscle Activity Estimation by Anthropomorphic Robot Fingers," 2011 International Symposium on Micro-Nano Mechatronics and Human Science pp.466-468, Nagoya, Japan, Nov 6-9, 2011
- Ming Ding, Kotaro Hirasawa, Yuichi Kurita, Hiroshi Takemura, Jun Takamatsu, Hiroshi Mizoguchi, and Tsukasa Ogasawar " Pinpointed Muscle Force Control in Consideration of Human Motion And External Force" 2010 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2010), pp.739--744, Tianjin, China, 2010.12.14-1
- Atsutoshi Ikeda, Yuichi Kurita, and Tsukasa Ogasawara, " Product Usability Estimation using Musculoskeletal Model," IEEE RAS / EMBS International Conference on Biomedical Robotics and Biomechatronics (IEEE/EMBS BIOROB 2010), pp.307--312, Tokyo, Japan, 2010.9.26-29