Yuichi Kurita, Biological Systems Engineering Lab.
Tactile modeling of humans and their applications to computer interface
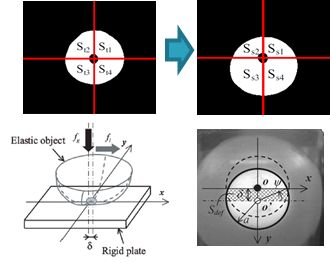
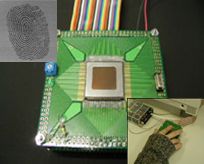
1. Background Improvement of the computer hardware technology continues to miniaturize notebook computers. PDA (Personal Digital Assistant) and mobile phones have also been improved their performance from year to year. To operate these compact information devices, input devices should be small and easy to use.2. Research Summary The eccentricity is a quantitative index to evaluate the slip condition on a fingertip. The prototype was developed that can capture the contact surface between the fingertip and the transparent plate by an embedded camera in real time.
3. Result
- We developed a prototype of the pointing device system. The velocity of the pointer is determined by detecting the center of the fingerprint and calculating the contact area. To confirm the effectiveness of the proposed method, we developed a prototype of the pointing device system. The experimental results showed that an operator can control the pointer with high accuracy.
- A weight and friction illusion device that controls the eccentricity of the contact surface was developed. The plate was actuated by a motor to achieve given desired eccentricity by a PID control. The desired eccentricity was obtained by known material parameters, friction coefficient, and force profiles. The grasp and load force profiles of the object with target weight/friction were given by a general force generation model from human measurements. The experimental results showed that the proposed device successfully presents the weight/friction illusions.

Publications
- Yuichi Kurita, Satoshi Yonezawa, Atsutoshi Ikeda, and Tsukasa Ogasawara, " Weight and Friction Display Device by Controlling the Slip Condition of a Fingertip, " IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE IROS 2011) pp.2127-2132, San Francisco, CA, USA, Sep 25-30, 2011
- Yuichi Kurita, Atsutoshi Ikeda, Jun Ueda, and Tsukasa Ogasawara, "A Fingerprint Pointing Device Utilizing the Deformation of the Fingertip during the Incipient Slip," IEEE Transactions on Robotics, Vol.21, No.5, pp.801-811, 2005.10