Yuichi Kurita, Biological Systems Engineering Lab.
マルチモーダルフィードバックを用いた遠隔操作ショベルのクロスプラットフォームコックピットシステム
伊藤卓(2021年3月博士後期課程修了)
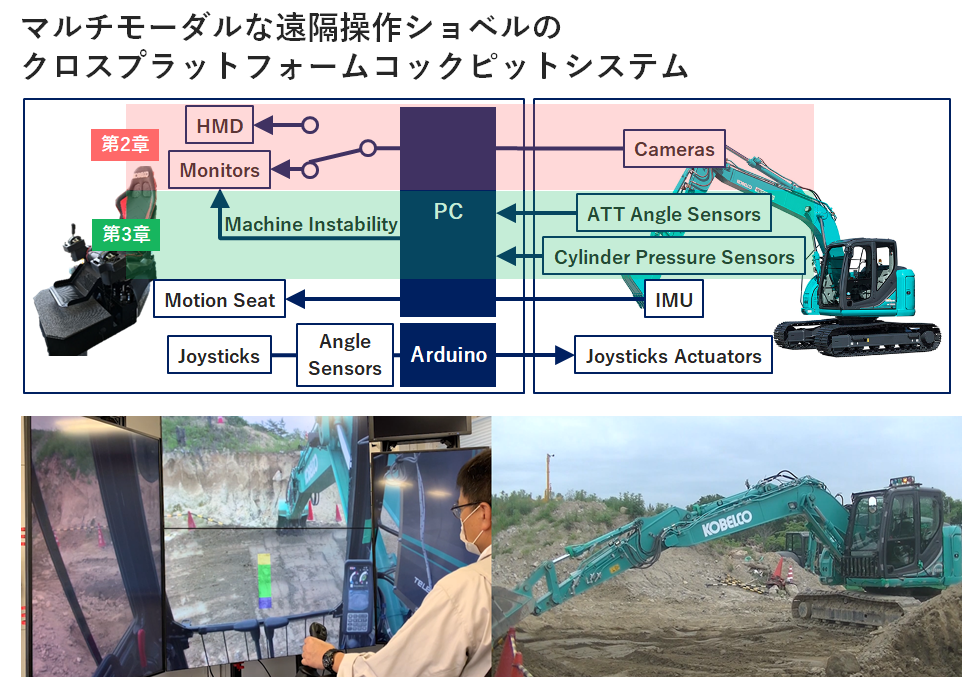
本研究では,遠隔操作油圧ショベルシステムに対して,オペレータの知覚特性に合ったインターフェースと,人間に理解しやすいように機械情報を変換してフィードバックする情報提示システムとを備えた,マルチモーダルで,かつ遠隔操作油圧ショベルを操作できるだけでなく,シミュレータによる訓練が可能なクロスプラットフォームコックピットを構築した.具体的には,視覚システムの評価・検討のため,油圧ショベルの旋回操作をポインティング動作とみなし,旋回操作の難易度を表現する旋回操作難易度モデルを構築した.また,現在主流の遠隔操作ショベルにおいては受け取りにくい情報をフィードバックすることを目的とし,アタッチメント姿勢に応じて,機体が動き出しはじめる掘削反力に対して現在の掘削反力がどの程度余裕があるかを直接オペレータへ提示することを考え,掘削反力と機体姿勢から算出される機体不安定度フィードバックを提案し評価した.最後に,これらの評価・検討を元に,オペレータの知覚特性に合ったインターフェースと,人間に理解しやすいように機械情報を変換してフィードバックする情報提示システムとを備えた,マルチモーダルなコックピットシステムにより,遠隔操作油圧ショベルを操作できるだけでなく,シミュレータによる訓練が可能なクロスプラットフォームコックピットシステムを提案,また実際に構築し,評価を実施した