Yuichi Kurita, Biological Systems Engineering Lab.
Haptic Enhanced Reality Method for Laparoscopic Surgery (腹腔鏡手術のための力覚重畳呈示手法)
大鶴 佳秀(2016年3月博士前期課程修了)
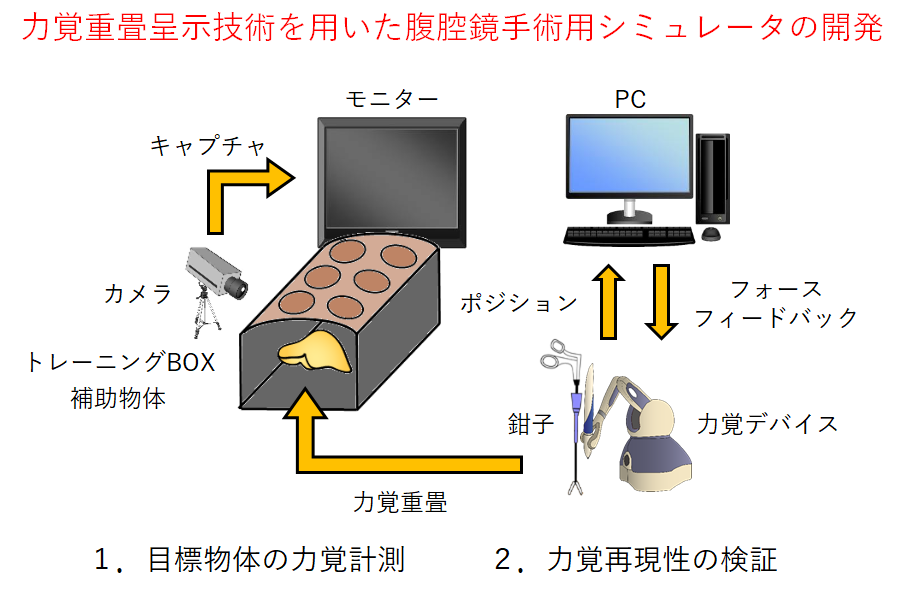
我々は,低性能なハプティックデバイスであっても非常にリアルな反力を呈示することを支援するための方法として力覚重畳呈示(HER)を提案している.このアプローチでは,ハプティックデバイスによって生成される力は,目標物体と類似の特性を有する補助物体の反力と重なる.これにより,力覚重畳呈示では簡単な仮想力計算モデルでも粘弾性物体の力覚呈示が可能となる.そこで,本研究では力覚重畳呈示手法により粘弾性物体である臓器の力覚応答を再現することを目的とし,腹腔鏡手術トレーニングへの応用を目指した.本研究では,力覚呈示システムの構成と仮想力計算および補助物体との接触判定手法を開発し臓器を目標物体としたときの反力呈示実験と官能評価実験を行った. 実験では牛の肝臓を目標物体とし,力覚重畳呈示と補助物体を使わないVR 呈示を行ない,触感の主観的な印象の評価を行った.反力呈示実験では,力センサを用いて押し込み,なぞり反力の測定を行い,力覚デバイスから生成される仮想力計算に用いるパラメータを調整することで,目標物体に近い反力応答を呈示できていることを確認した.