Yuichi Kurita, Biological Systems Engineering Lab.
心的回転による認知負荷を軽減するための遠隔操作用レバー操作インタフェースの開発
森田 将大 (2022年3月工学部第二類卒業)
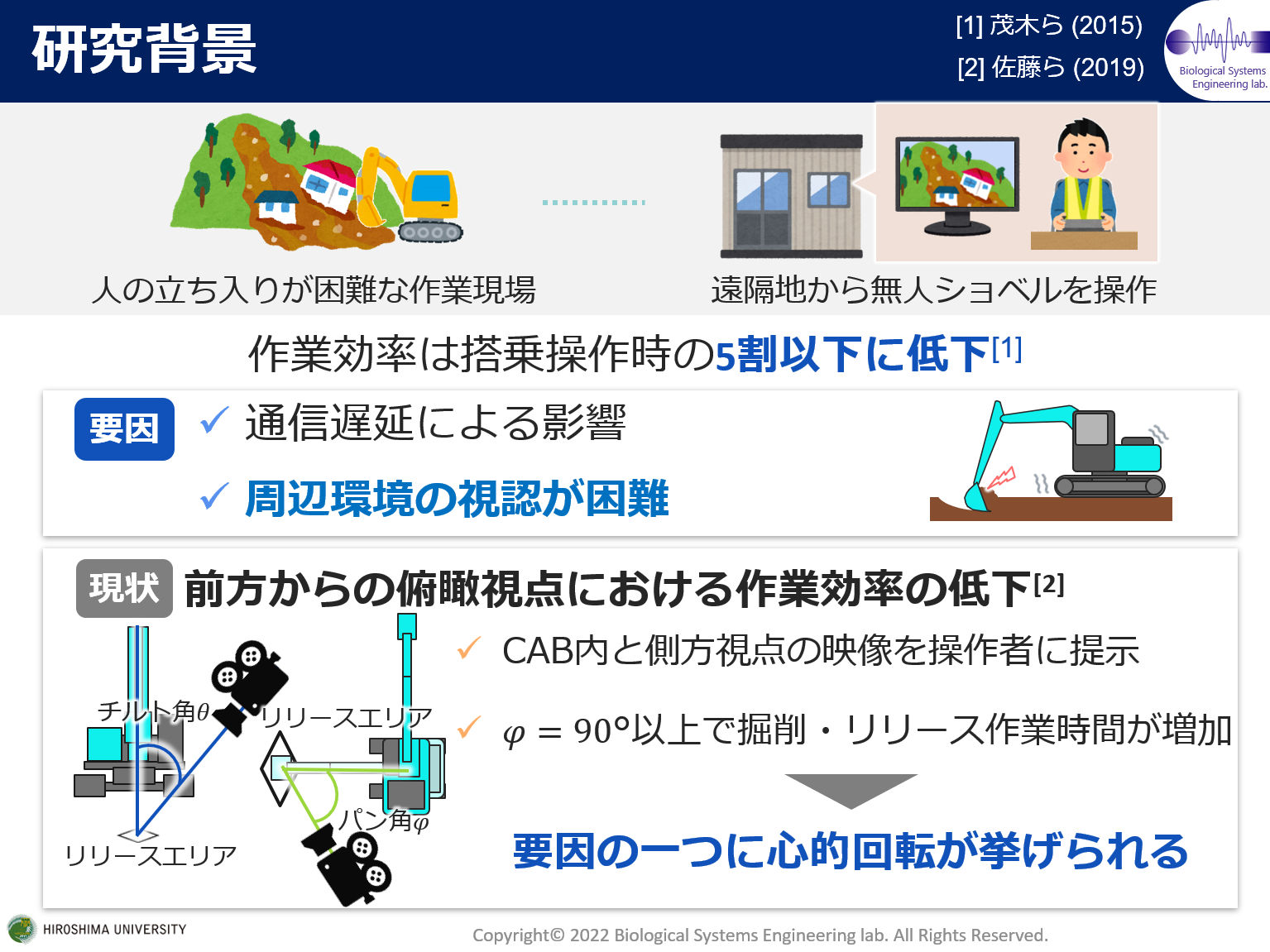
油圧ショベルの遠隔操作システムは,実機に搭乗して操作した場合と比べて作業効率が低下することがこれまでの研究で示されている.作業効率が低下する原因として,通信遅延による影響や周辺環境の視認が困難な点が考えられる.カメラを搭載したドローン等による俯瞰視点の導入することで,操作者が手元で自由に位置や向きを調節でき,操作者が見たい作業現場の様子を容易に提示できるようになった.しかし,現在の操作系における前方からの俯瞰視点時の作業効率は後方からの俯瞰視点時と比較して低下することが判明している.その要因の一つに心的回転が挙げられている.心的回転とは脳内で自己と対象物の向きを合わせる働きのことであり,この影響を軽減することで前方からの俯瞰視点での作業効率を向上させることができると考えた.そこで,本研究では心的回転による認知負荷を軽減するための遠隔操作用レバー操作インタフェースを開発する.