Yuichi Kurita, Biological Systems Engineering Lab.
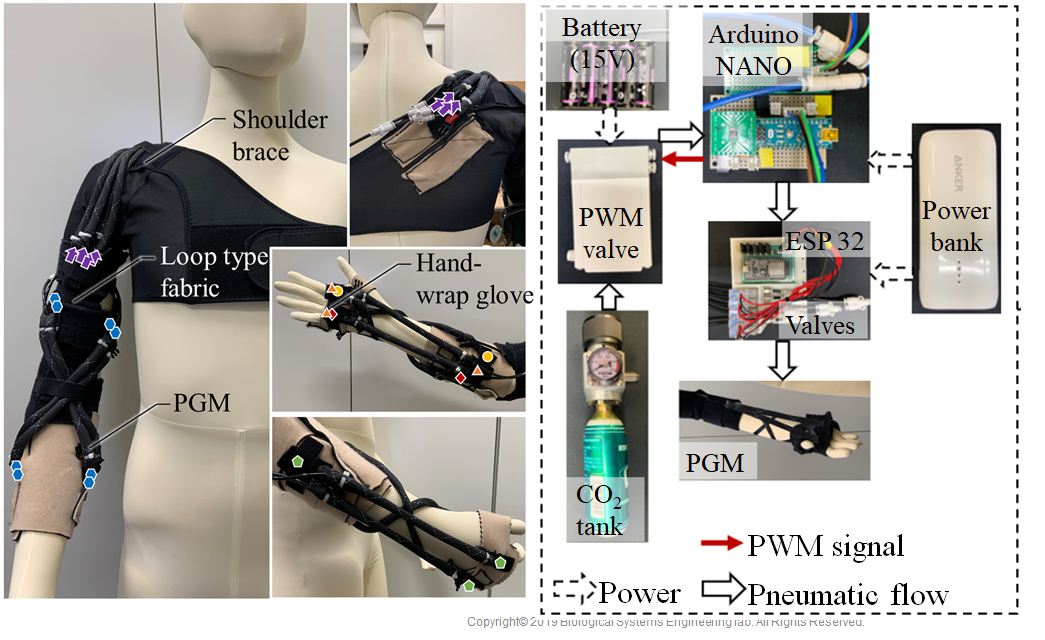
ForceArm: a wearable pneumatic gel muscle (PGM)-based assistive suit for the upper limb
DAS Swagata(2021年3月博士後期課程修了)
This work is an attempt to design and evaluate a wearable robotic assist cum rehabilitation solution for the upper limb. We developed an upper limb wearable assistive suit called ForceArm that supports wrist flexion-extension, forearm pronationsupination,elbow flexion, and shoulder flexion. The ForceArm suit was first evaluated to verify the effects of muscle unloading in elderly subjects for the DOFs of the forearm. The other two DOFs, elbow and shoulder flexion, were evaluated to identify muscle unloading effects in healthy subjects. In addition, a gaming scenario was set up to test its effectiveness in motor rehabilitation for the elderly with respect to time. ForceArm is comprised of low-pressure type pneumatic actuators called pneumatic gel muscles (PGMs). The PGMs have more potential than conventional pneumatic actuators due to their lower air pressure requirement. These muscles are capable of producing larger forces at lower air pressure as compared to conventional pneumatic actuators. This makes the system usable as a standalone, without the need for a heavyweight air compressor for extended time-periods. Table 1.1 shows the comparison of this prototype with some previously developed prototypes. It can be seen that at a lower operating air pressure, ForceArm could achieve equivalent force density, when compared to the other prototypes using pneumatic actuation technologies. In addition, only soft components were used to build the wearable part of the prototype.