Yuichi Kurita, Biological Systems Engineering Lab.
A Soft Exoskeleton Jacket for Human Motion Interaction
Vega Ramirez Antonio(2018年9月博士前期課程修了)
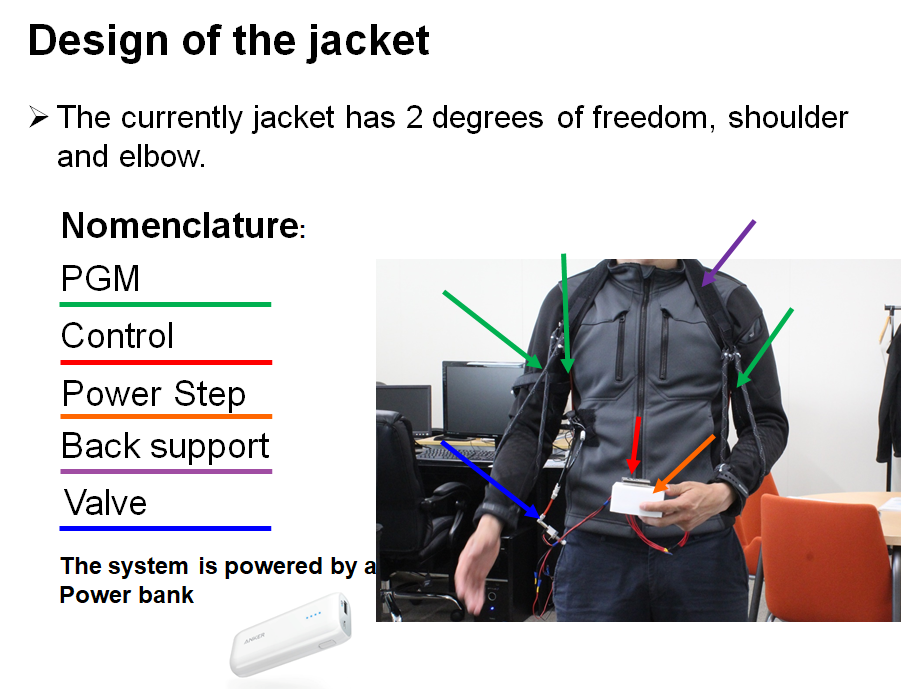
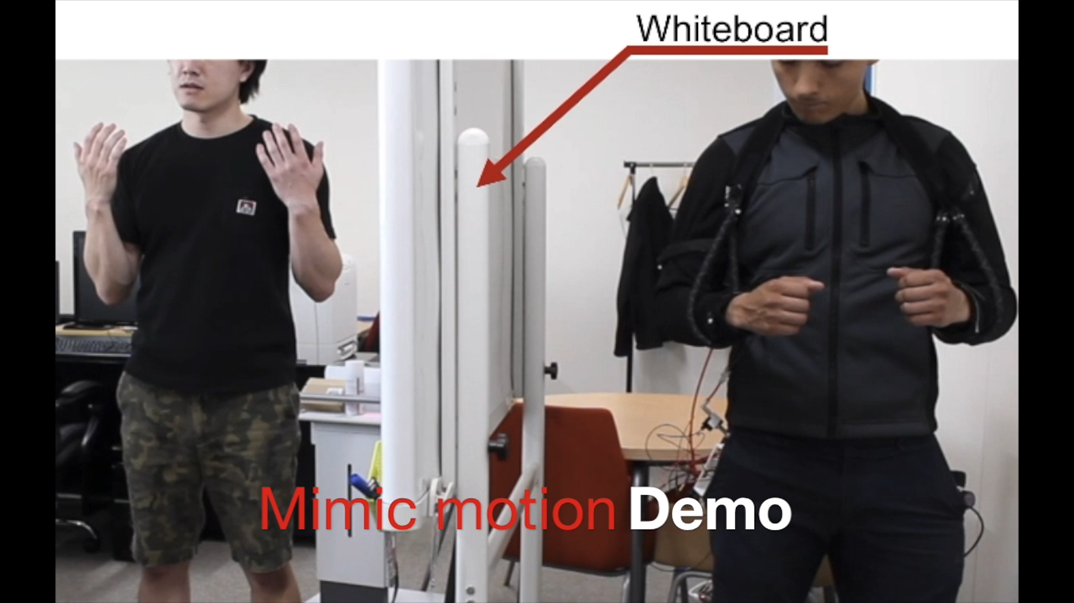
This project proposes the use of new technologies for human augmentation in rehabilitation creating a soft exoskeleton jacket in combination with a natural interaction system, in addition this device can be used for tele-rehabilitation (or e-rehabilitation), because of the capabilities that present the dispositive of use Wi-Fi. The user wears the jacket that has attached soft actuators called PGM (Pneumatic Gel Muscles) and a microcomputer to control the suit to receive indication of the therapist in charge. The experimental results allow us to conclude that: (1) The pneumatic gel muscles are a good alternative for hard actuators, regarding price, flexibility and naturalness in the adaptation of the human motion. (2) The system present robustness in the acquisition of the motion of an input user to reply in an output user. (3) The system has flexibility to track different motions of a user input, due to the flexibility of the PGM new gestures can be implemented. (4) The implementation of this system represents a good relationship between cost and benefit.