
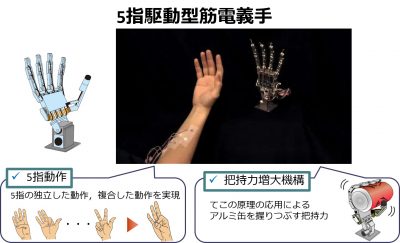
This study proposed an EMG prosthetic hand that has five independently driven fingers, a flexion drive, and a force-magnification drive. The flexion drive allows for rapid finger motion, and the force-magnification drive allows for a firm grasp. To realize a natural feeling of control similar to that of movements with nonamputated parts, the control system includes an impedance model of human forearms and utilizes the muscle contraction level extracted from a user’s EMG signals. We experimentally verified that the maximum fingertip force of the hand exceeds 20 N, and the time required to fully close the hand by the flexion drive is 0.53 s. In response to EMG signals, it was also verified that the fingers can flex smoothly and the grasping force can be modulated. Furthermore, we showed that taking EMG signals as input makes it possible to control six operations, including those that use the five fingers in distinctive ways.
Resarch topics

Electromyographic Prosthetic Hand using Grasping-Force-Magnification Mechanism with Five Independently Driven Fingers
References
1. Electromyographic prosthetic hand using grasping-force-magnification mechanism with five independently driven fingers, T. Takaki, K. Shima, N. Mukaidani, T. Tsuji, A. Otsuka and T. Chin
Advanced Robotics, Volume 29, Issue 24, pp. 1586-1598,
2. Multivariate Pattern Classification based on Local Discriminant Component Analysis, Nan Bu, and Toshio Tsuji, Proceedings of IEEE International Conference on Robotics and Biomimetics 2004, 290, Shenyang, China, August 2004.
3. A Recurrent Probabilistic Neural Network with Dimensionality Reduction Based on Time-series Discriminant Component Analysis
Hideaki Hayashi, Taro Shibanoki, Keisuke Shima, Yuichi Kurita, and Toshio Tsuji
IEEE Transactions on Neural Networks and Learning Systems, Vol. 26, No.12, pp. 3021-3033, DOI: 10.1109/TNNLS.2015.2400448, 2015.
